Einfach zu bedienen
Intuitive Konfiguration und Geräteverwaltung per Drag & Drop sowie grafische Konfigurationselemente.
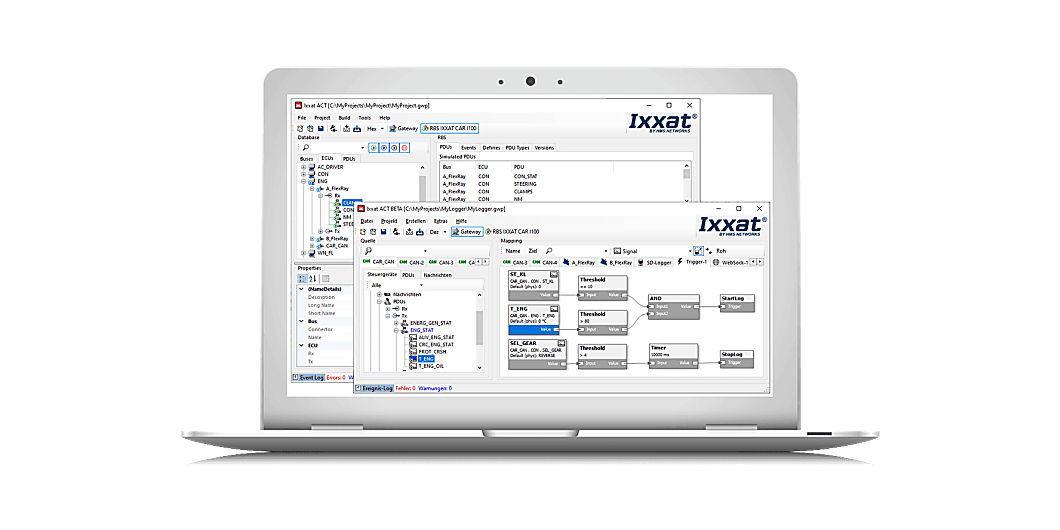
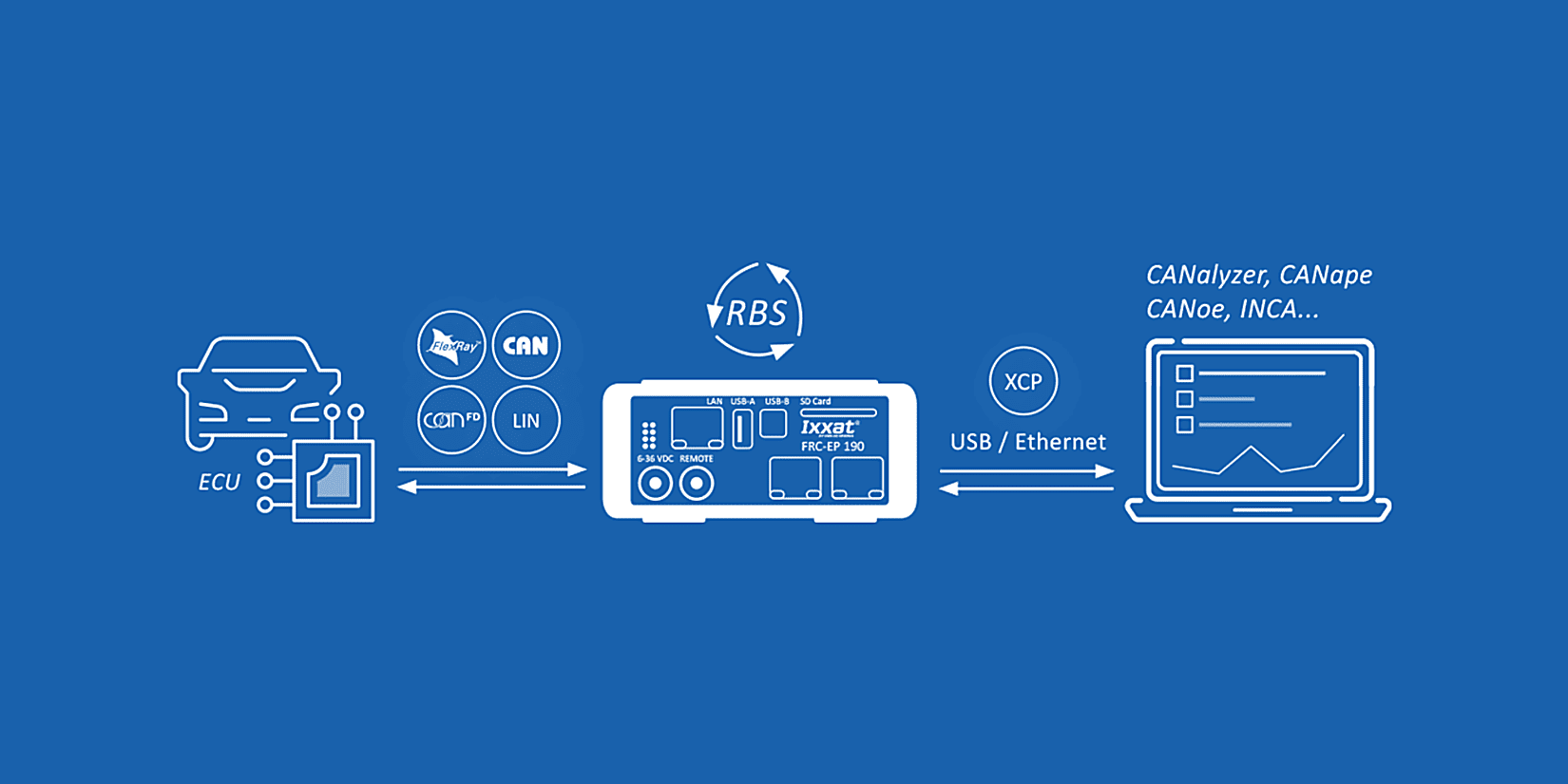
Das Advanced Configuration Tool (ACT) ist ein leistungsstarkes und einfach zu bedienendes Softwarepaket für Windows. Das Tool wird verwendet, um Konfigurationen für die Computing Gateways der Serien Mobilizer, CANnector und FRC-EP zu erstellen, einschließlich der Funktionalität der Restbussimulation (RBS). Nachdem eine Konfiguration erstellt wurde, wird sie auf das Gerät heruntergeladen und standalone ausgeführt.
Intuitive Konfiguration und Geräteverwaltung per Drag & Drop sowie grafische Konfigurationselemente.
Passt sich Ihren Anforderungen an – in drei verschiedenen Varianten erhältlich und leicht erweiterbar über C-User-Code und/oder Matlab/Simulink.
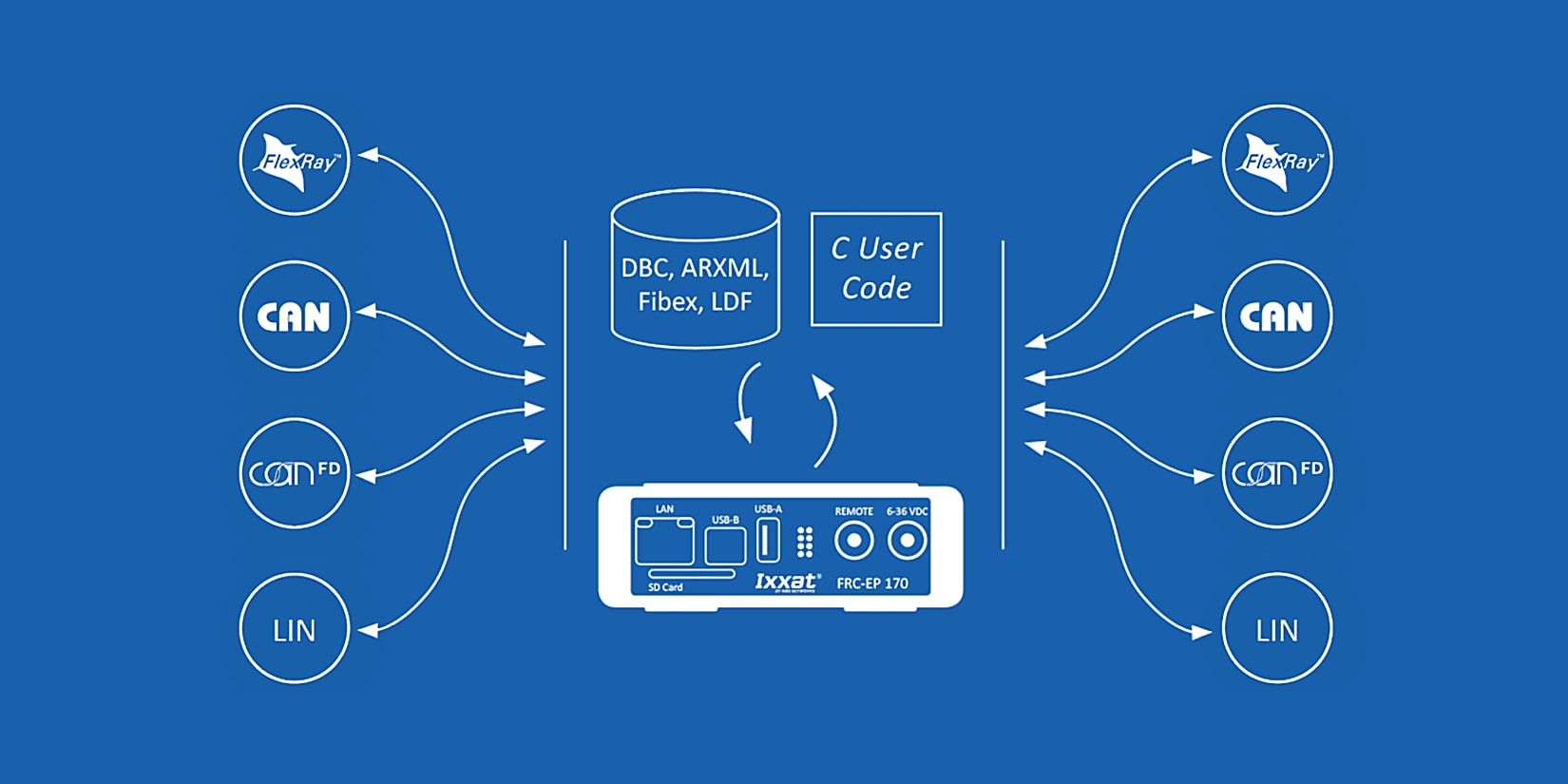
Unterstützung vieler gängiger Datenbankformate, einschließlich DBC, LDF, Fibex und ARXML.
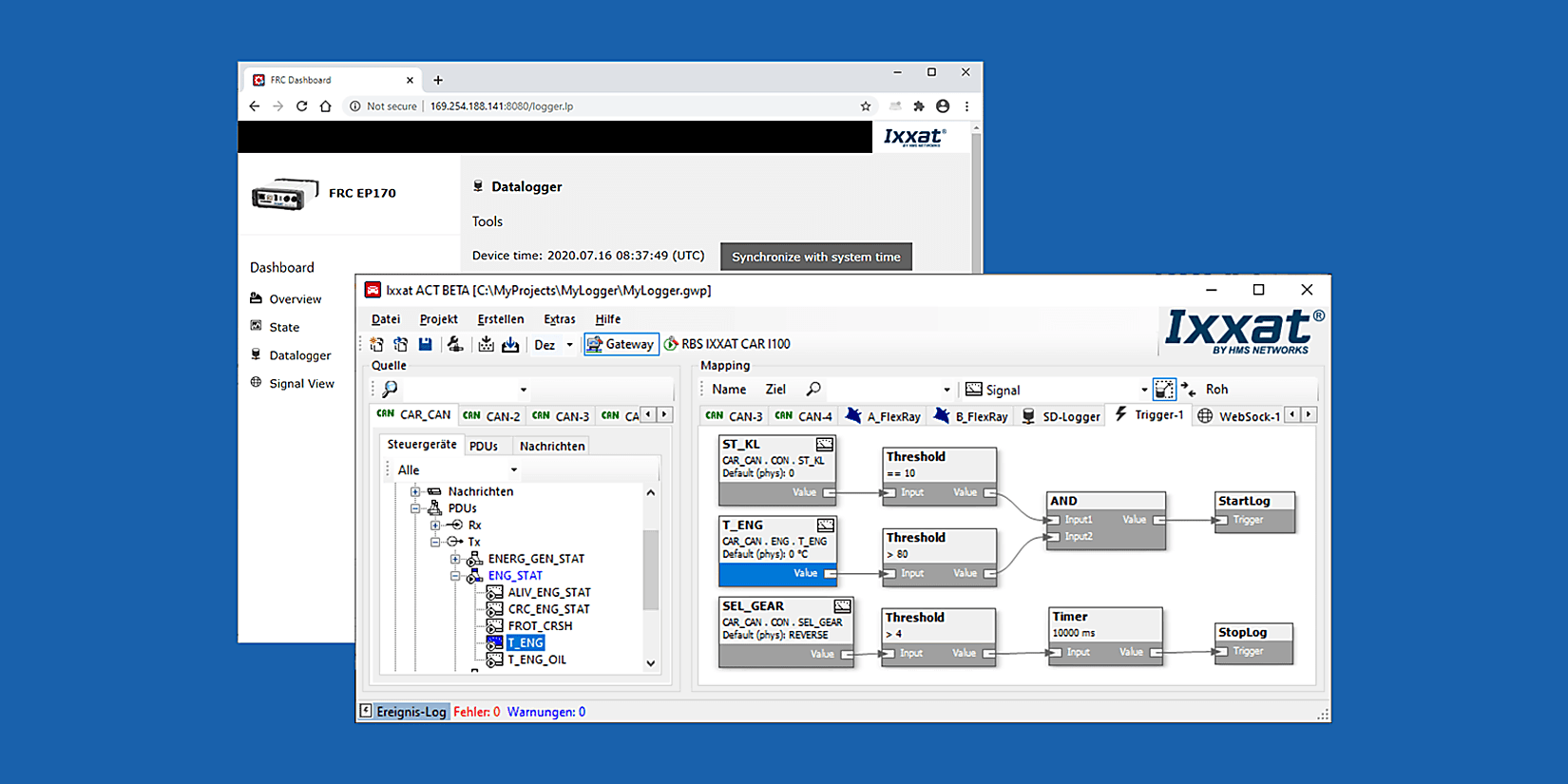
Video – Konfiguration eines einfachen Loggers mit ACT.

Alle Datenlogging-Lösungen von HMS beinhalten eine integrierte Triggerfunktion. Diese besteht aus individuellen Ereignissen, durch die der Logging-Vorgang ausgelöst, also gestartet oder beendet wird. Dazu zählen zum Beispiel das Überschreiten eines Schwellwerts, das Eingehen definierter Nachrichten oder auch logische Verknüpfungen von Ereignissen.
Wie können Sie eine Gateway-Anwendung konfigurieren? Alles, was Sie tun müssen, ist die Gateway-Ansicht des ACT-Tools zu nutzen und das Drag-&-Drop-Konzept zu verwenden, um die Quell- und Zielbeziehung zu definieren. Ziehen Sie einfach die gewünschten Daten vom Quellbus und lassen Sie sie auf das Ziel fallen – es ist nicht relevant, ob es sich um ein reales Bussystem oder den User-Code, Logger oder etwas anderes handelt. Am Ende kann die erstellte Konfiguration auf eine Ixxat Embedded-Plattform geladen und eigenständig ausgeführt werden.
Busbeschreibungsdateien können, müssen aber nicht für diese Schnittstellen verwendet werden. Falls vorhanden, helfen sie Ihnen bei der einfachen Konfiguration eines signalbasierten Gateways, da sie die Signale aus der Busbeschreibungsdatei auswählen und sie auf einen anderen Bus mit einer zugrundeliegenden Beschreibungsdatei abbilden können. Auf diese Weise ist es möglich, Signale aus verschiedenen Quellnachrichten in einer Zielnachricht zu kombinieren.
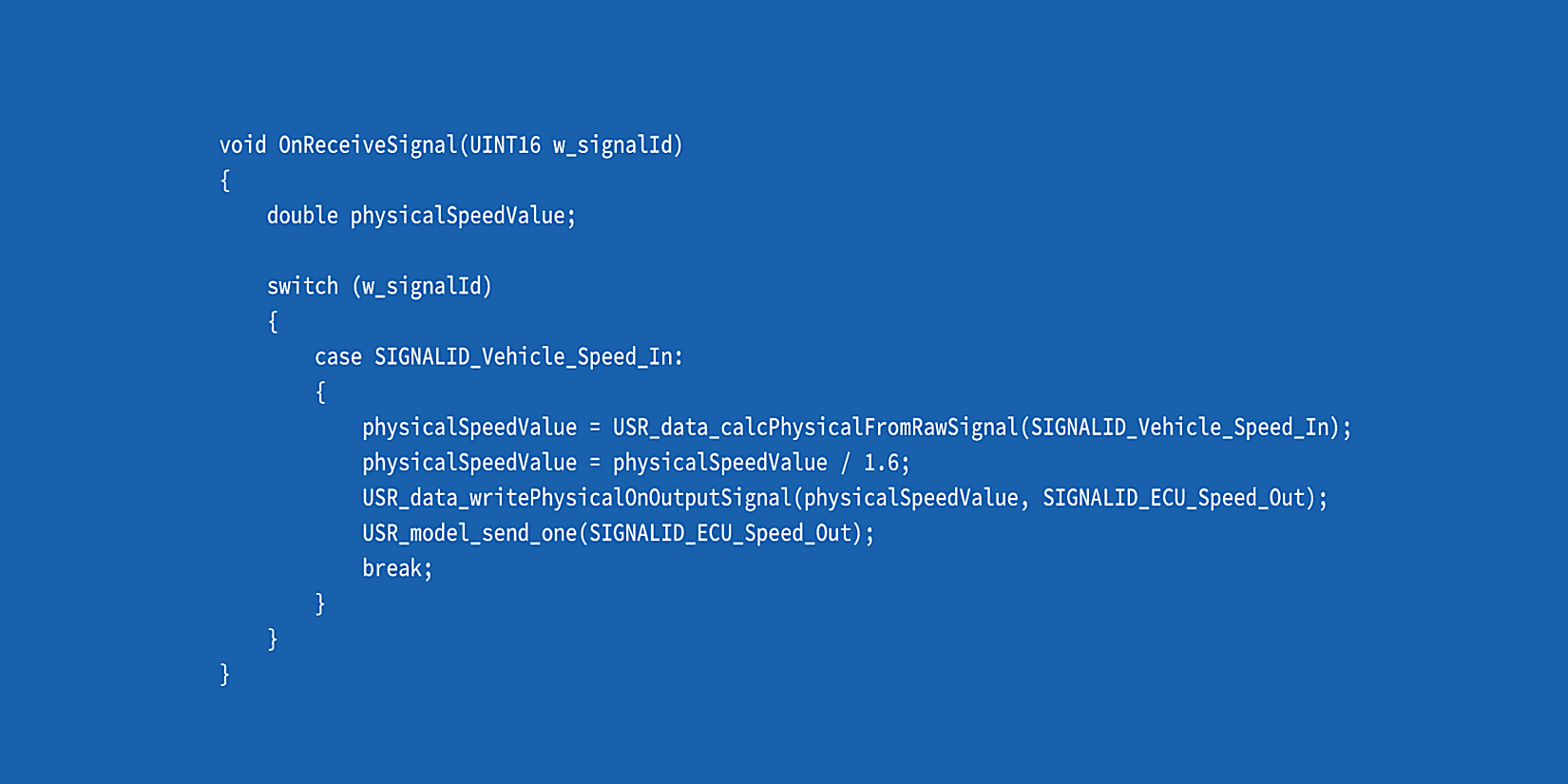
Was aber, wenn die physikalische Signaldarstellung zwischen Quelle und Ziel nicht übereinstimmt? In diesem Fall können Sie entweder eine automatische Signaltransformation aktivieren oder Ihren User-Code oder Ihr MATLAB/Simulink-Modell verwenden, um komplexe Signalanpassungen vorzunehmen.
Und wie werden die generierten Frames auf dem Zielbus gesendet? Hierfür stehen mehrere Optionen zur Verfügung:
Aber einige Signale brauchen keinen wechselnden Wert? Ja, das könnte der Fall sein. In einem solchen Fall können Sie für diese Signale einen statischen Standardwert verwenden. Dies kann ein statischer Wert sein, der in der zugrunde liegenden Busbeschreibungsdatei definiert ist, oder ein persönlich definierter Wert.

Fertig !
Sie müssen Ihr CAN(FD)-, FlexRay- oder LIN-basiertes System mit einem modernen industriellen Kommunikationssystem verbinden? Kein Problem, wählen Sie einfach ein Gerät der CANnector-, Mobilizer- oder FRC-EP-Serie mit einer EtherCAT-Erweiterung. Innerhalb von ACT können Sie dann mit dem einfachen Drag-&-Drop-Konzept Mappings von/zu dem EtherCAT-Slave erzeugen. ACT erzeugt automatisch eine entsprechende ESI-Datei, die zusammen mit jedem EtherCAT-Master-fähigen Gerät verwendet werden kann, um Ihr EtherCAT-Netzwerk komfortabel zu konfigurieren.
Einmal an EtherCAT angeschlossen, werden alle Daten – die vom CAN(FD)-, FlexRay- oder LIN-Bussystem oder von jedem anderen EtherCAT-basierten Sensor oder IO-Gerät kommen – synchronisiert und auf demselben Kommunikationssystem an Ihre SPS oder Ihren PC verteilt, der die Testausführung steuert.
Die Geräte FRC-EP, Mobilizer und CANnector verfügen zusätzlich über analoge oder digitale I/O-Anschlüsse. ACT ermöglicht es, diese Signale wie jedes andere Signal in Ihrer Konfiguration zu verwenden. Nach der Konfiguration von Datenrichtung, Wertebereich, Umrechnungsregeln und Einheit können die IOs einfach per Drag-&-Drop zu jedem anderen Bussystem gemappt werden.
Mit Hilfe von ACT können Sie den virtuellen Bus zu Ihrer Konfiguration hinzufügen. Der virtuelle Bus kann verwendet werden, um Ihre eigenen "Variablen" (Umgebungsvariablen) in der Konfiguration zu definieren. Diese Variablen können über das Drag-&-Drop-Konzept in/von jedem anderen Bussystem abgebildet werden. Dies ermöglicht es – zum Beispiel – eine solche Variable durch Ihr C-User-Code-Modul zu berechnen und dann in jedem anderen Bussystem zu verwenden.
Eine Funktionalität des Gateways ist die Generierung von DBC-Dateien basierend auf der Abbildung der verschiedenen physikalischen und logischen Busse – für CAN, CAN FD, Generic Ethernet, virtuelles CANonEthernet, CAN@net.
XCPonEthernet ist zu kompliziert für Sie? Kein Problem, Sie können auch das wesentlich einfachere "Fast Data Exchange"-Protokoll verwenden, um Softwarelösungen von Drittanbietern mit dem Gerät der CANnector-, Mobilizer- oder FRC-EP-Serie zu verbinden. Mit ACT werden alle benötigten Signale über das Drag-&-Drop-Konzept von/auf das FDX-Bussystem abgebildet. ACT generiert automatisch die entsprechende XML-Beschreibungsdatei für den FDX-Bus. Diese XML-Datei kann in Ihre Softwarelösung importiert werden und Sie sind bereit, Daten zu lesen oder zu senden.
Sie möchten die Verkabelung reduzieren oder große Entfernungen überbrücken? Das generische Ethernet-Protokoll löst dieses Problem. Generisches Ethernet ist ein virtuelles CAN(FD)-, FlexRay- oder LIN-Bussystem auf Ethernet. Mit Hilfe von ACT können Sie die gewünschten Daten von/auf das Generic Ethernet Bussystem abbilden.
Die Daten werden dann über Ethernet verteilt und können mit Hilfe eines weiteren CANnector, Mobilizers oder eines Geräts der FRC-EP-Serie auf die physikalischen Protokolle zurückgewandelt werden. Dies ist dann der klassische Range-Extender.
Für den Fall, dass Sie beabsichtigen, den Datenstrom direkt an einen PC anzuschließen, können Sie unseren VCI-Treiber verwenden, um das Gerät als Remote-PC-Schnittstelle zu verwenden.
Bis zu 16 solcher virtuellen Busse können konfiguriert werden. Damit können Sie die gewünschten Daten auf bis zu 16 verschiedene IP-Adressen oder Ports verteilen. So können Sie Ihr eigenes Ethernet-basiertes Kommunikationsnetzwerk erstellen und auf der "letzten Meile" einfach CAN(FD)-, FlexRay- oder LIN-Protokolle verwenden.
Das Generic-Ethernet-Protokoll erlaubt auch die Kombination von Ixxat CAN@net-Geräten mit Geräten der CANnector-, Mobilizer- oder FRC-EP-Serie. Nicht genügend CAN-Ports vorhanden? Kein Problem, nutzen Sie einfach diese Möglichkeit zur Erweiterung auf bis zu 136 CAN / 72 CAN FD-Schnittstellen.
Sie haben keinen Windows-PC, der die Verwendung des VCI-Treibers erlaubt? Das Generic-Ethernet-Protokoll ist sehr einfach auf jedem Zielbetriebssystem zu implementieren. Im einfachsten Fall können Sie ein Terminalprogramm zum Senden und Empfangen der Daten verwenden.
Folgende Arbeiten werden automatisch von ACT erledigt:
Basierend auf dem FlexRay/CAN-RBS und der XCPonEthernet-Erweiterung können die von der RBS gesendeten Signale definiert und manipuliert werden. Dazu gehören beispielsweise:
Die Steuerung der Signalmanipulation kann über Usercode, das Gateway oder XCPonEthernet erfolgen.
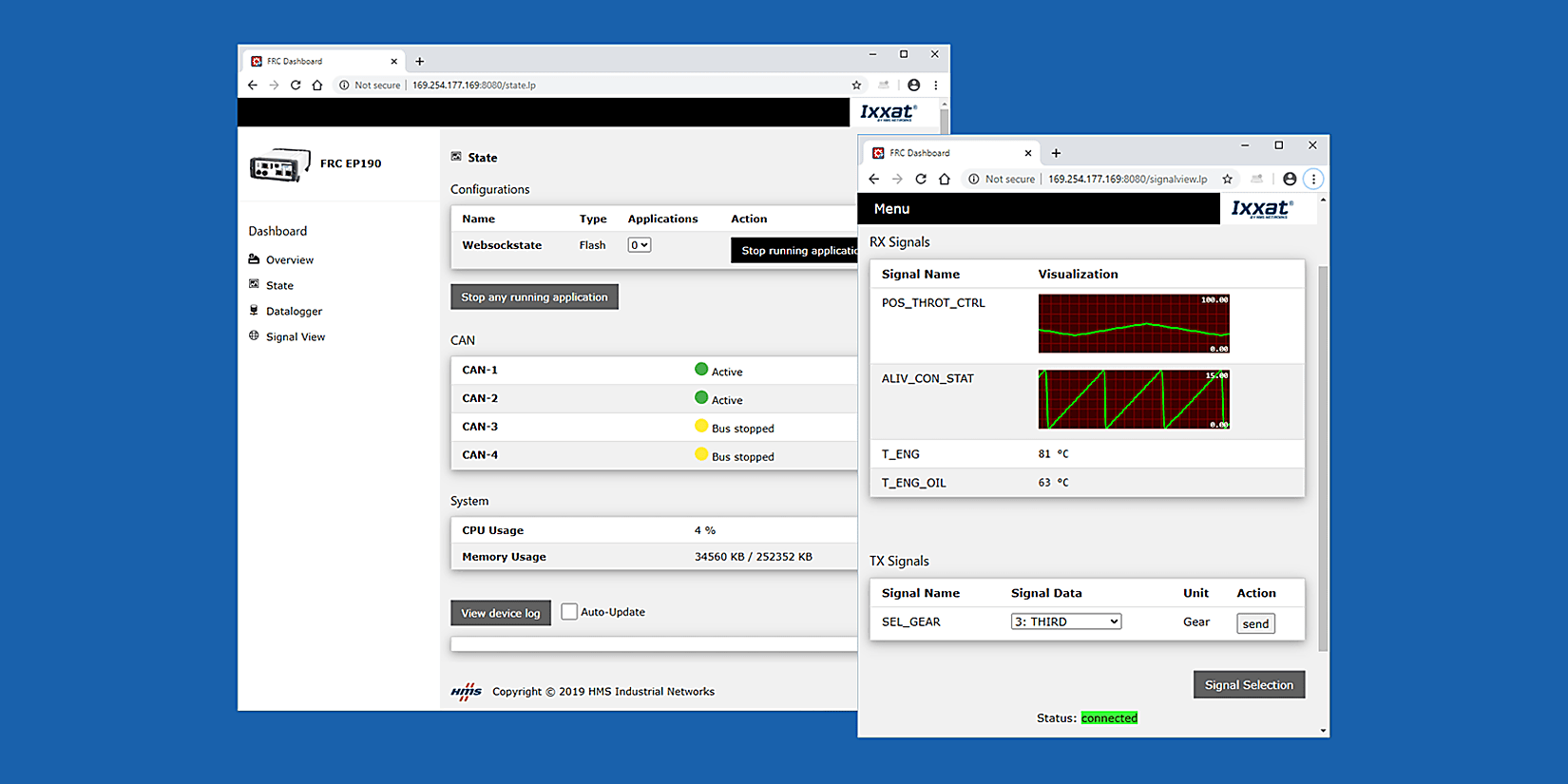
Sie können individuell auswählen, welche Signale visualisiert werden sollen und ob diese in Text- oder Grafikform angezeigt werden sollen. Eine solche Visualisierungskonfiguration kann entweder auf der CANnector/Mobilizer/FRC-EP-Serie oder auf dem Visualisierungsgerät gespeichert werden. Dies ermöglicht es, Ansichten individuell zu speichern oder festzulegen, was gesehen werden darf.

Möchten Sie eine bestimmte Visualisierung haben? Wenn die Standardvisualisierung nicht ausreicht, können Sie ganz einfach Ihre eigene HTML5-basierte Visualisierung hinzufügen. Sie müssen sich nur mit dem standardisierten Datenaustauschstrom verbinden.
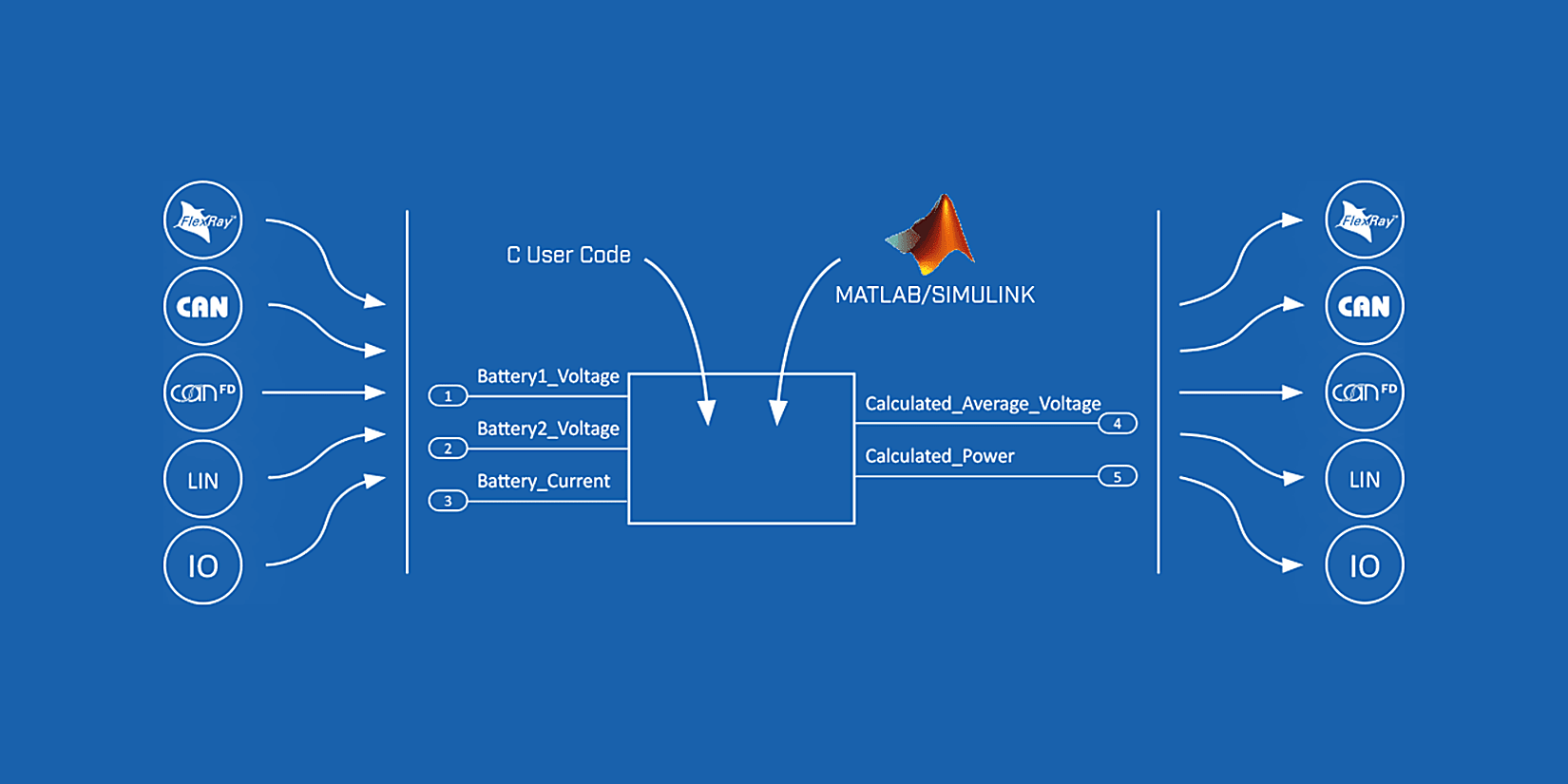
Sind Funktionsmodelle auf der Basis von Matlab oder Simulink bereits vorhanden, können diese per ACT in die Gesamtkonfiguration integriert werden. Bei Bedarf generiert das ACT automatisch ein Basismodell, das alle benötigten Signale sowie das Framework für die Signaltransformation vom Rohwert zum physikalischen Signalwert enthält. Der Nutzer muss lediglich die gewünschten Funktionen mit Matlab oder Simulink entwerfen oder das bereits vorhandene Modell in das Basismodell kopieren. Am Ende wird das ausführbare Modul automatisch aus diesem Modell generiert und in die Gesamtkonfiguration, die eigenständig auf dem Gerät ausgeführt wird, integriert.
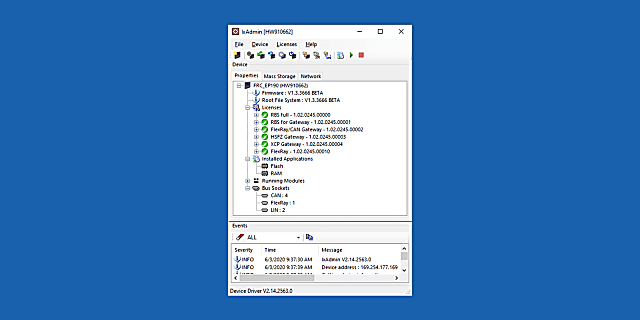
IxAdmin ist das PC-basierte Administrationstool (Freeware) für die FRC-EP-Serie, den Mobilizer und die CANnector Plattform, das über USB, Ethernet oder WLAN angeschlossen werden kann.
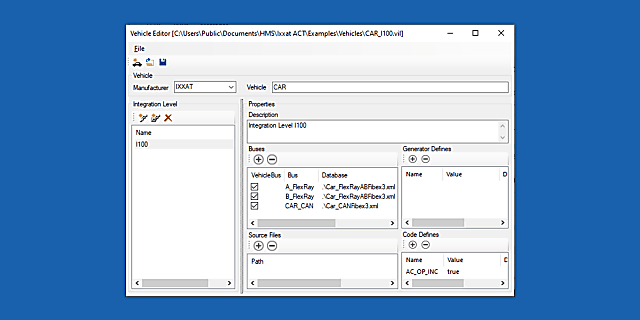
Grundlage für die meisten Lösungen sind Busbeschreibungsdateien im CANdB-, DBC-, LDF-, FIBEX- oder AUTOSAR-XML-Format. Normalerweise enthalten die Beschreibungen viele Informationen, aber es fehlen wichtige Details wie CRC- oder Alive-Counter-Algorithmen, die benötigt werden, um z.B. eine Restbussimulation zu erzeugen.
Der Fahrzeug-Editor ermöglicht die Erstellung einer kompletten Fahrzeugbeschreibungsdatenbank, die alle benötigten Informationen enthält. Im Falle von Änderungen während des Lebenszyklus Ihrer Testanwendung (z.B. neue Fahrzeugintegrationsebenen) kann eine neue Variante einer solchen Fahrzeugbeschreibungsdatenbank erstellt werden, die dann eine einfache Portierung bestehender Restbus- oder Gateway-Konfigurationen ermöglicht. Dies spart Zeit und reduziert das Risiko, Fehler in bereits verifizierte Testkonfigurationen einzubringen.
| Standard | Lite | Freeware | |
| Produktlink | Produktdetailseite | Produktdetailseite | - |
| Bestellnummer | 1.12.0248.00001 | 1.12.0248.00000 | - |
| IxAdmin | ✔ | ✔ | ✔ |
| Logger | ✔ | ✔ | ✔ |
| Gateway | ✔ | ✔ | ✔ * |
| User-Code | ✔ | ✔ | ✔ |
| Visualisierung | ✔ | ✔ | ✔ |
| Matlab/Simulink | ✔ | ✔ | - |
| EtherCAT | ✔ | ✔ | ✔ |
| RBS, Signalmanipulation & Fehlerinjektion | ✔ | - | - |
| XCP | ✔ | ✔ | - |
| FDX | ✔ | ✔ | - |
| OPC/UA | ✔ | ✔ | - |
* Nur bei FlexRay RX
Erfahren Sie mehr über die verschiedenen Hardware-Plattformen, die wir für den Einsatz mit unserem ACT-Tool anbieten. Durch die Kombination von ACT mit den Plattformen der FRC-Serie, CANnector oder Mobilizer lassen sich unterschiedlichste Anwendungen realisieren.