Eine der wichtigsten Fragen bei CAN-FD ist, ob eine Verwendung zusammen mit einem Standard-CAN-System möglich ist. Die Antwort lautet: eher nein. Um dies zu klären, sollten wir zuerst einen Blick auf die Nachrichten-Frames werfen. Auf den ersten Blick sehen diese nahezu identisch aus.
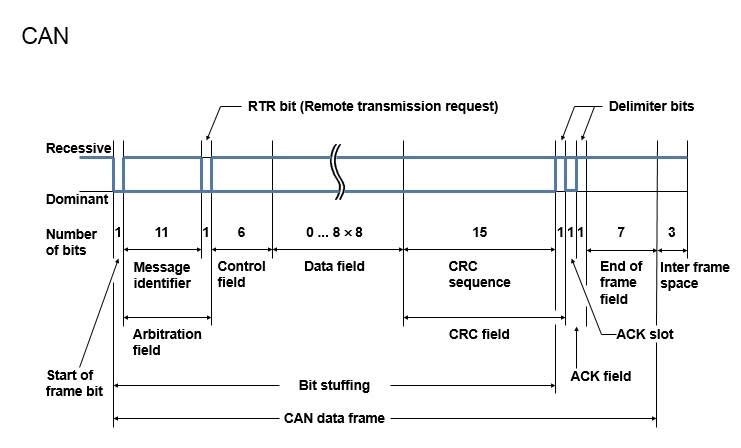
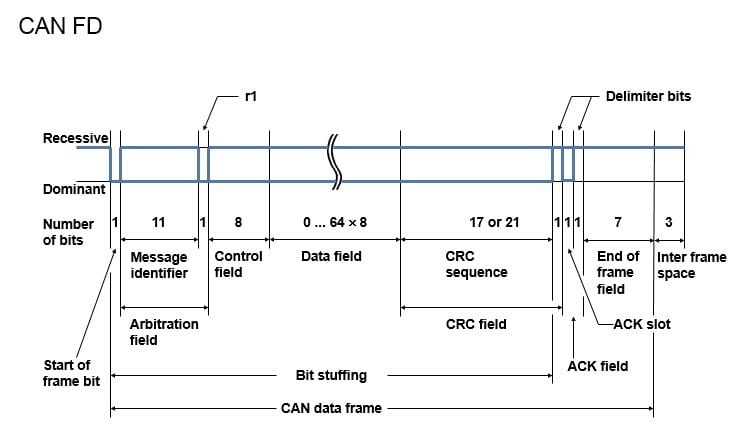
Die Nachrichten beginnen mit einem Start-Bit und gehen dann in den Nachrichten-Header mit dem Arbitrierungsteil über. Nach Abschluss der Arbitrierung beginnt der Nutzdaten-Teil. Am Ende wird die Nachricht durch einen CRC-Bereich und eine End-of-Frame-Sequenz abgeschlossen.
Das Hauptproblem bei der Betrachtung von CAN vs CAN FD besteht darin, dass die Protokolle zwar sehr ähnlich sind, aber eben nicht gleich. Einer der wichtigsten Unterschiede ist, dass während der Datenübertragungsphase die Daten bei CAN-FD beschleunigt übertragen werden. Da die Nachricht zu Beginn wie eine gültige Standard-CAN-Nachricht aussieht, wird Sie auch von einem Standard-CAN-Controller empfangen. Beim Wechsel zur beschleunigten Übertragung der Nutzdaten wird der Standard-CAN-Controller jedoch keine Stuff-Bits erkennen und einen Fehler vermuten. Der Standard-CAN-Controller wird die Nachricht dann durch Senden eines Error-Frames verwerfen.
Andersherum ist ein CAN-FD-Controller in der Lage Standard-CAN-Nachrichten zu empfangen. In Zukunft wird es CAN-FD tolerante Standard-CAN-Controller geben. Sie werden eine CAN-FD-Nachricht erkennen und diese ignorieren, ohne einen Error-Frame zu senden. In der Zwischenzeit ist der Einsatz von CAN-FD-Geräten in Standard-CAN-Systemen jedoch keine gute Idee, da ein reibungsloser Betrieb nicht möglich ist.