Anybus X-gateways 能够将基于 DeviceNet 的机器人工作单元接入多种其他工业网络,这种方式比采用内置多网络的机器人控制柜更为经济,同时也实现了机器人工作区与整个工厂网络之间界限分明。

“好吧,那我们该如何解决这个问题呢?” 安德斯·曼多森(Anders Mandorsson)在被告知他被承诺访问的PROFIBUS系统突然被证明是禁区时想到的。现在,他必须找到另一种方法,让基于DeviceNet的机器人系统与客户的PROFIBUS网络进行通信。他找到的解决方案是HMS的Anybus X-gateway。
Svensk Industriautomation (SVIA) 是一家位于瑞典延雪平的快速发展的自动化公司,为北欧国家、德国、英国、荷兰和美国的客户开发机器人系统。例如,这些系统被组合到机器人单元中,这些单元能够与工厂中的其他系统进行通信。
机器人单元的核心是SVIA自己的视觉系统,称为Pickvision,它可以准确检测特定物体在传送带上的放置方式,从而使机器人能够拾取物体。简单来说,你可以说SVIA使机器人能够看到。
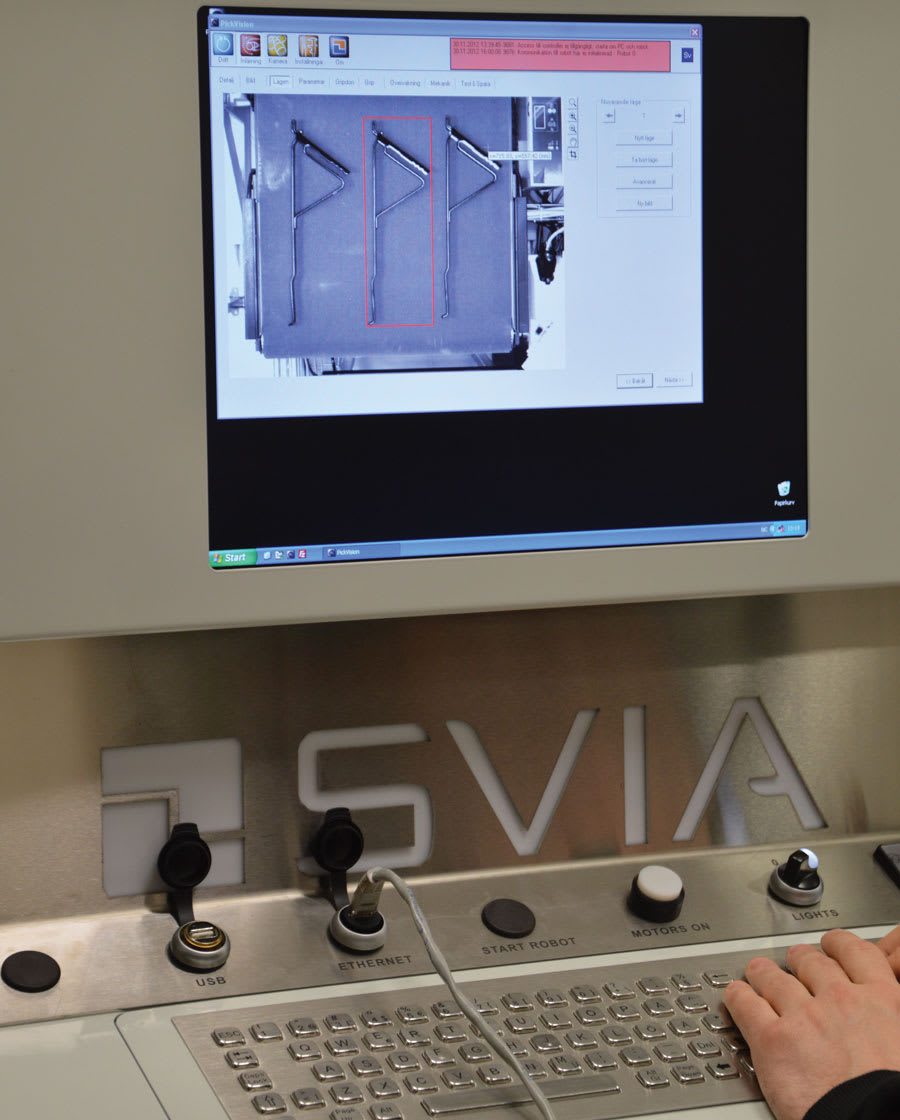
Svia机器人所看到的。
这项革命性的技术在自动化市场上非常受欢迎,并使SVIA的营业额在过去几年中翻了一番。
“我们的优势在于简单,”SVIA的设计师兼项目经理Anders Mandorsson说。“告诉机器人从传送带上拣选什么很容易,然后你就可以出发了。” 通过使用 Pickvision 软件,用户可以拍摄要从传送带上拾取的物体的照片。
该软件会自动检测物体的形状,每次该形状出现在相机中时,机器人都能够确定如何拾取它。
作为最先进的自动化系统,SVIA的机器人单元需要与某种全厂的工业网络进行通信,而这种类型的通信并不总是无忧无虑的。
“几年前,我们为一位客户建造了一个机器人单元,该客户向我承诺可以访问他们的PROFIBUS系统,但过了一段时间,很明显,我们的系统只是他们网络中的一个独立节点。就在那时,我们找到了HMS的Anybus X-gateway。我们尝试将一个安装到我们的机柜中,它以一种非常优雅的方式处理了我们基于DeviceNet的系统与客户的PROFIBUS系统之间的转换,“Anders Mandorsson说。


运行中的Svia机器人。
从那时起,SVIA在他们交付给全球客户的许多机器人单元中使用了Anybus X-gateway。再一次,简单是关键。“DeviceNet是我们在大多数机柜中使用的标准,我们无需自己处理到其他网络的转换,只需安装HMS的X-gateway即可。
它更便宜,但最重要的是,它使客户更容易,因为他在我们的系统和他自己的工厂网络之间得到了明确的隔离,“Anders Mandorsson 说。
SVIA的机器人单元通常配备ABB的机器人,这些机器人在基于DeviceNet的网络上运行。机器人可以很容易地与另一个 DeviceNet 网络进行通信,但如果它们要连接到另一个网络,例如 PROFIBUS 网络(使用西门子的 PLC)或 EtherCAT 网络(使用倍福的 PLC),则需要一个“转换器”。
Anybus X-gateway通过内置软件处理两个网络之间的转换,该软件从一侧重构报文,使其在另一侧易于理解。使用Anybus Configuration Manager软件在几分钟内完成配置,这意味着无需编程。
Anybus安装在Svia机器人中。
- Anders Mandorsson,SVIA 设计师兼项目经理
SVIA的机器人单元非常灵活,可以很容易地进行调整,以满足不同的客户应用,如安装、包装、钻孔和车削。 通过Anybus X-gateway,SVIA在可以连接的网络方面也可以非常灵活。
“老实说,我们不再真正考虑网络了,”Anders Mandorsson说。 “当我们创建机器人系统时,我们只需订购X-gateway,它就可以转换为客户的工业网络,我们将其插入,它就可以工作了。”