CAN (Controller Area Network), CAN FD (CAN with Flexible Data-Rate) and CAN XL are three versions of the CAN bus system, which is frequently used in automotive and industrial automation.
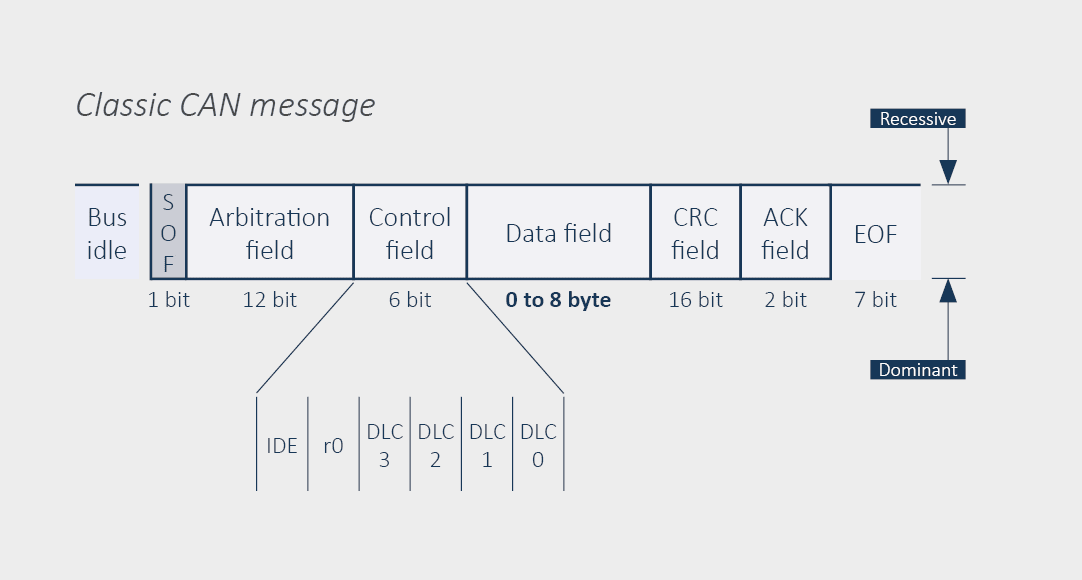
The classic CAN was developed in the 1980s and is widely used in the automotive industry for networking control units (ECUs) as well as in industrial applications. Higher protocols based on CAN, such as CANopen, DeviceNet or SAE J1939, are also used.
With classic CAN, data rates of up to 1 Mbit/s are supported and a maximum of 8 bytes can be transmitted per message.
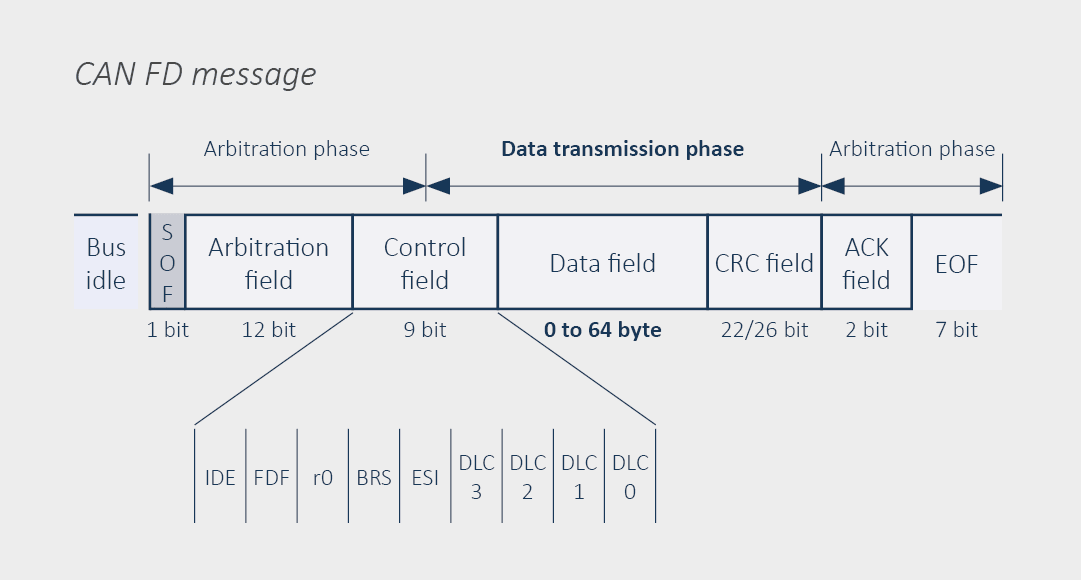
The need to be able to transfer larger amounts of data has grown, especially in the automotive sector. For this reason, Bosch presented an extended version of the familiar classic CAN in 2012, in which the usable data rate and the user data length were significantly extended. On the other hand, proven CAN concepts were retained: Arbitration based on message ID, event-controlled sending of messages and the acknowledgement of received messages using the acknowledgement bit.
In contrast to classic CAN, CAN FD enables the transmission of up to 64 bytes per message. During data transmission, CAN FD can switch to a higher bit rate of up to 5 Mbit/s (in some cases even up to 8 Mbit/s).
The main area of application for CAN FD is currently in the automotive environment; it is not often found in industrial applications.
Mixed operation (without additional gateways) between classic CAN nodes and CAN FD nodes is not possible, as the classic CAN node would respond to the CAN FD message by sending an error frame. After passing through the error states (error active/error passive/bus off), the classic node would stop communicating completely after a short time.
CAN XL is a new version of the Controller Area Network (CAN), which was launched shortly after the introduction of CAN FD. This development also reflects the rapid advances in automotive electronics. Particularly important here is the influence of Automotive Ethernet and IP technologies, which are significantly changing the way vehicles communicate.
The functional principle and basic structure of CAN XL correspond to those of CAN FD.
However, the identifier now only serves as a priority ID for arbitration. A 32-bit Acceptance Field (AF), which is part of the Control Field, was introduced for addressing.
While the arbitration rate remains unchanged at <1 Mbit/s, the data rate makes a huge leap forward with up to 20 Mbit/s. With the extended data field size of up to 2,048 bytes, Ethernet frames can now also be transmitted within a CAN message for the first time.
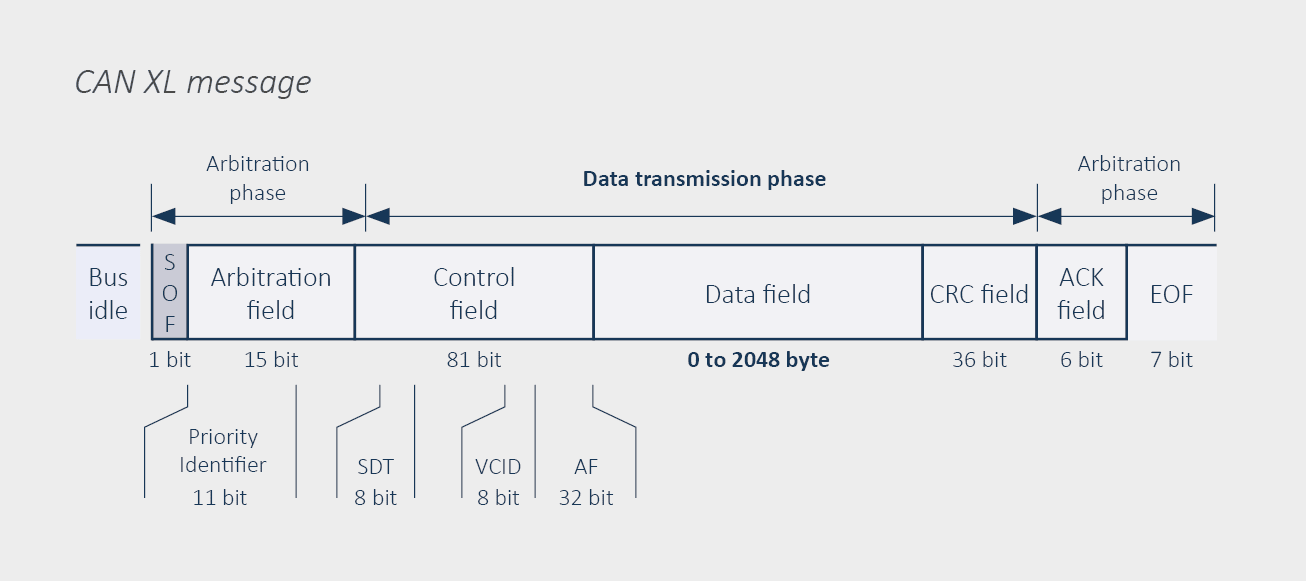
By introducing a new SDT (Service Data Unit Type) field, it is now also possible to refer to the next, higher-level protocol. This allows the user data to be interpreted differently depending on the SDT field. In addition, the new VCID field (Virtual CAN Network ID) can be used to subdivide a physical CAN XL network into several logical networks. Thanks to the 8-bit field, up to 256 different logical networks can be operated on CAN XL.
In summary, while classic CAN was designed for basic network requirements, CAN FD and CAN XL offer extended capabilities in terms of data rate and data length to cope with the growing need for higher data transmission and larger data packages in modern automotive and industrial applications.